0
发表咨询在线!

發布時間:2022-03-08所屬分類:科技論文瀏覽:1915次
摘 要: 摘要: 針 對 220KV 高壓輸電線除冰機器人這一新的機器人應用領域, 提出了一套機器人運動控制系統方 案 。 實 現 了 一 種 基于開放式運動控制系統,該系統由工控機和運動控制卡組成,通過無線通訊控制除冰機器人的行走及越障動作,如 跨 越 防 震錘及懸垂線夾等。 從系統

摘要: 針 對 220KV 高壓輸電線除冰機器人這一新的機器人應用領域, 提出了一套機器人運動控制系統方 案 。 實 現 了 一 種 基于開放式運動控制系統,該系統由工控機和運動控制卡組成,通過無線通訊控制除冰機器人的行走及越障動作,如 跨 越 防 震錘及懸垂線夾等。 從系統的硬件既軟件實現兩個方面分別介紹了其運動控制的實現過程,實驗結果表明該系統具有較高的可 靠 性、實時性及良好的人機交互性。
關鍵詞: 除冰機器人; 高壓輸電線; 運動控制
1 引言
我國是輸電線路覆冰最為嚴重的國家之一, 線路冰害事故發生的概率居世界前列,2008 年初我國南方的雨雪冰凍天氣更是給電力設施帶來災難性的破壞, 數名電力工人在輸電線路除冰過程中壯烈犧牲。因此,研究一種高度自動化的除冰機器人代替人工 除冰 對 于 保護 我 國 電網 的 安 全運 行 和 電力 工 人 的生 命安全具有極其迫切的現實意義。
目前除冰機器人已經成為機器人研究領域的一大熱 點,文獻結合輸電 線 路 上覆 冰 的 去除 方 法 設計 了 一 種兩 臂 式 除冰 機器人; 文獻提出了一種新的輸電線路除冰機器人越障方法并對其進行了運動學和動力學分析; 除冰機器人是在惡劣環境中對輸電線路進行無損除冰作業,其結構、功能、動力、通信等方面都有特殊的要求,因此有必要對除冰機器人的本體、除冰裝置、系統功能設計,軟硬件實現等各個方面加以深入的研究。
而作為除冰機器人的一個重要部分, 運動控制系統性能將直接 影 響除 冰 機 器人 工 作 性能 及 可 操控 性。 本 文針 對 220KV 輸電線路的結構特點,按照除冰機器人實際工作的要求,設計了一種結構清晰、層 次分 明、拓 展性 良 好 的輸 電 線 除冰 機 器 人運動控制系統。
2 除冰機器人結構
目前,本文設計的除冰機器人采用的是三臂結構。它的本體主要由三個機械臂、掛線裝置及除冰裝置、本體艙等組成,其結構如圖 1 所示。
在三個機械臂中:中間機械臂的肘關節可伸縮,其上安裝有主驅動輪,主要用來驅動機器人的行進和保持機器人平衡;兩側機械臂的關節都是旋轉關節,每個臂末端安裝一個掛線裝置,掛線裝置配備有掛線輪和除冰裝置,主要用于完成除冰工作和夾持電纜。
相關知識推薦:自動化機器人類論文發表指導
本體艙則是由動力箱、控制箱和電池箱三個部分組成。 除冰機器人采用混合動力方式供電, 機上搭載了一臺汽油發電機和一塊大容量電池, 它們的重量較大被分別安排在本體艙的兩端。控制箱是除冰機器人控制系統的核心,工控機和眾多的外圍設備都被安放在其中。
3 除冰機器人的作業環境及控制目標
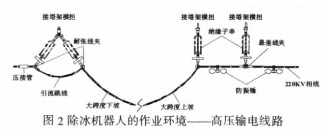
本文設計的除冰機器人主要用于 220KV 高壓輸 電 線 路的除冰作業。 220KV 高壓輸電線路是一種柔性較大、障礙復雜的工作環境, 其典型線路及障礙情況如圖 2 所示, 它主要包括:直線、大跨度輸電線上(下)坡、絕緣子、防 振 錘、各種 線 夾、引流 跳線等。 除冰機器人運動控制系統的主要控制目標可以概括為以下五個方面:(1)保證除冰機器人在柔性架空線上的平穩爬行,包括上下坡、制動、防滑、負載等各方面的問題;(2)避越絕緣子、防振錘、各種線夾(懸垂線夾、耐張線 夾 等)、壓接 管、引 流線、線 塔等;(3) 保障機器人姿態平穩以及保持其它導線和線塔金屬部件的安全距離;(4)保障除冰裝置的平穩運行;(5)保證除冰機器人及其除冰裝置在冰凍雨雪天氣條件下良好運行。
4 控制系統功能設計
除冰機器人是一個復雜的自動化設備, 其驅動元件數量眾多,包括了四大類總共 20 個電機,即除冰電機 2 個、驅動及關節電機 8 個、升降機重心調節電機 7 個、剎車電機 3 個。 且除冰機器人工作在柔性輸電線路上,運動狀態比較復雜,此外線路上存在很多障礙物并非都是典型結構, 而且機器人要長期在惡劣環境下工作,可能會出現許多預想不到的情況。 在這種情況下,為了保證機器人工作的穩定性和安全性, 其運動控制系統不但要具備對單個電機的穩定控制能力,而且也應該具備易操作性。因此,如圖 3 所示,除冰機器人的運動控制系統分為兩個部分,即遠程監控端和機器人本體控制端。 它們之間通過無線方式實現雙向數據傳輸: 一方面地面監控人員可以接收來自機器人的視頻圖像、探測傳感器數據、機器人位姿狀態、輸電線路覆冰厚度和微氣象等信息;另一方面,地面監控人員可以對機器人發出各種控制命令,指導機器人工作。
遙操作控制指令分為任務級指令和關節級指令兩種: 其中任務級命令直接給機器人下達操作任務,例如翻越各種線夾,避讓防震錘等,機器人根據事先編程的運動過程進行運動,完成任務;關節級命令是指直接對機器人的各個關節或功能單元進行控制。
5 控制系統硬件結構
控制系統整體硬件結構如圖 4 所示
根據分級遞階的思想, 在硬件系統的設計上采用了三層結構,即遠程監控層、機載控制層以及執行層。 遠程監控層位于地面監控計算機, 主要負責觀測機器人的工作狀況及對其進行遙操作;機載信息管理與決策層和執行層位于機器人本體上,主要負責 現場 傳 感 信息 的 實 時采 集、 各 種控 制 算 法的 具 體 實 現 及底 層運 動 控 制。 其 中 機 載信 息 管 理與 決 策 層的 功 能 由機 載 工控機實現,執行層的功能由嵌入式運動控制卡實現。 伺服電機組包括驅動、關節電機及剎車電機,開關電機組包括除冰電機、升降電機及重心調節電機。
地面 監 控計 算 機 和機 器 人 機載 工 控 機之 間 采 用 無 線 局 域網 通 訊 方式 進 行 傳感 信 息 和控 制 指 令的 傳 輸。 機器 人 機 載工控 機 和運 動 控 制卡 采 用 基于 現 場 總線 的 分 布式 控 制 結構。 運動 控 制 卡 的 核 心 由 DSP 和 FPGA 組 成, 它 與 機 載 工 控 機 一 同構 成 了 一 個 開 放 式 運 動 控 制 系 統,即“PC+運 動 控 制 器”模 式。這樣就將 PC 機的信息處理能力、開 放 式 的特 點 與 運動 控 制 器的 運 動 軌 跡 控 制 能 力 有 機 的 結 合 在 一 起, 具 有 信 息 處 理 能 力強、開放程度高運動軌跡控制準確、通用性好的特點。
6 控制系統軟件
除冰機器人運動控制系統遠程控制端如圖 5 所 示,該 系 統采用 VC++.NET 平臺編寫,應用多線 程 機 制可 以 同 時對 多 個 電機進行實時控制,并且具備單個關節或者任務級控制能力。
如圖 5 所示,該系統根據電機類型特點及其任 務 分工 設 計了五種關節級指令控制模塊,即驅動電機控制、關節電機控制、前臂其它電機、中臂其它電機、后壁其它電機。
由于 在 除冰 機 器 人行 走 過 程中 要 使 用三 個 驅 動 電 機 并 行驅動,而在越障過程中則會根據具體情況選擇其中兩個驅動電機組合來驅動機器人行走,因此在驅動電機模塊采用了復選框方式來實現電機運動組合,并且可以通過運動方向復選框來選擇除冰機器人的運行方向,驅動電機的運行參數則可以通過其參數 設 置完 成。 除 冰機 器 人 關節 電 機 控制 一 般 在其 越 障 過 程中 使 用,在 這 個 模 塊 中 關 節 電 機 采 用 單 個 電 機 控 制 模 式,通 過電機選擇可以選擇需要控制的關節,同時其運動方向可以通過關節電機運動方向確定。 此外,為了減少操作的難度,控制系統設計中盡量減少按鈕的數量,除冰機器人的其它電機控制中采用單個按鈕來控制電機的啟停,按鈕標簽標示其運動形式。
同時,該控制系統還對于除冰機器人的一些行 為進 行 了 任務 級 指 令規 劃,如 除冰 機 器 人 前 景、后 退、跨 越 防 震 錘、跨 越 懸垂線夾。
7 結束語
本文所設計的除冰機器人運動控制系統能夠對其各個電機進行穩定的實時控制,機器人在實驗中運動靈活可靠,所設計的 開放 式 運 動控 制 系 統具 有 良 好的 抗 干 擾能 力 及 良好 的 可 拓展性。下一步將完成除冰機器人的傳感系統,使其具備環境及自我感知能力,為自主控制提供基礎。——論文作者:王 聰 孫 煒 向陽琴
參考文獻
[1]張屹, 邵威, 高虹亮等. 高壓輸電線路除冰機器人的機構設計 [J]. 三峽大學學報(自然科學版), 2008, 30(6): 69 - 72.
[2] 侯文琦, 王劍, 馬宏緒, 劉建平. 輸電線路除冰機器人機構設計與動力學仿真[J]. 機械與電子, 2009, (10): 52 - 55.
[3]上海市電力公司. 220KV 及以上典型線路桿型裝置圖[M]. 北京: 中國電力出版社, 2005.
[4]孫鑫, 余安萍. VC++深入詳解[M]. 北京: 電子工業出版社, 2006.
[5]景晨, 李碩. 北極冰下自主/遙控機器人控制系統設計[J]. 微計算機信息, 2009, 3-2: 253-255.
声明:①文献来自知网、维普、万方等检索数据库,说明本文献已经发表见刊,恭喜作者.②如果您是作者且不想本平台展示文献信息,可联系学术顾问予以删除.

SCISSCIAHCI

